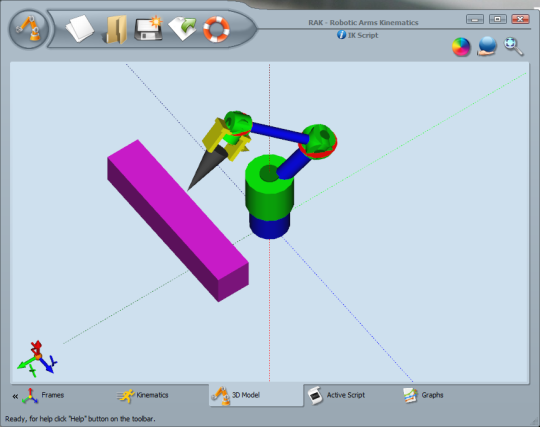
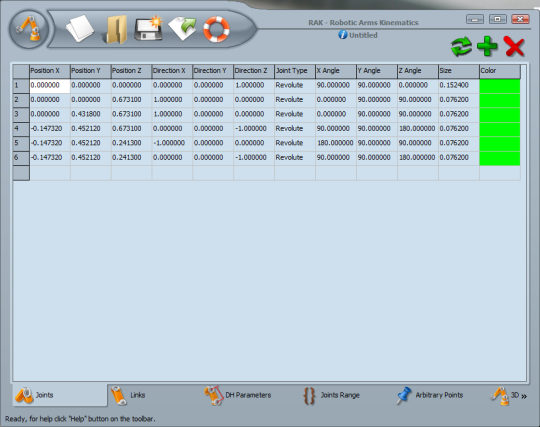
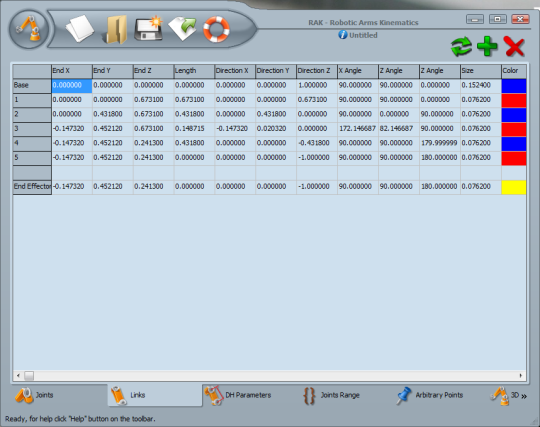
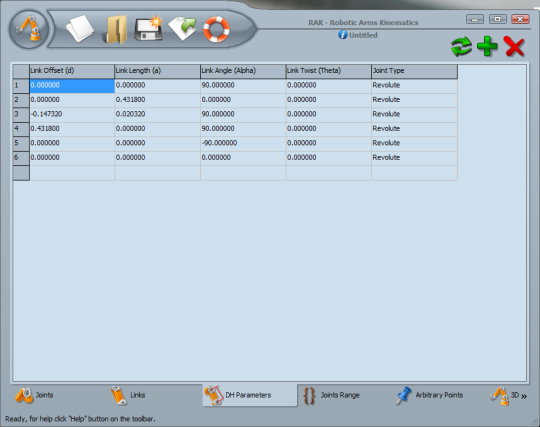
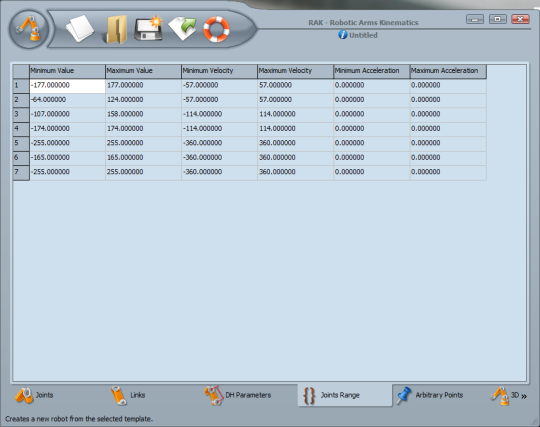
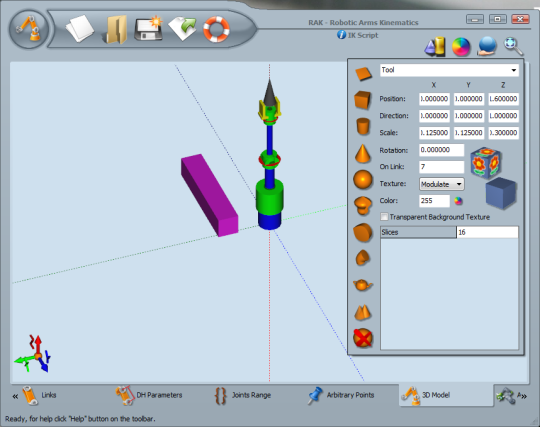
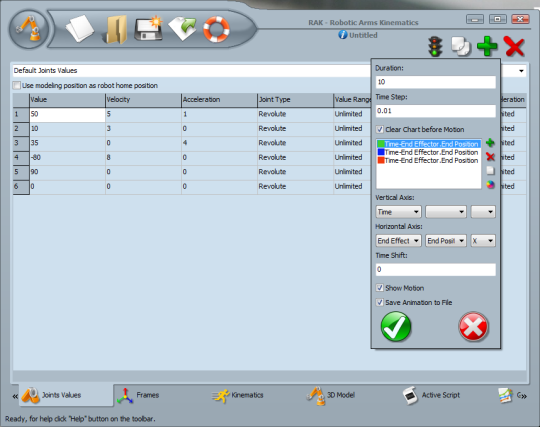
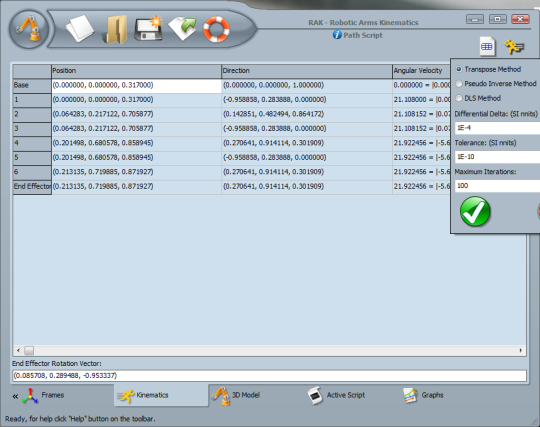
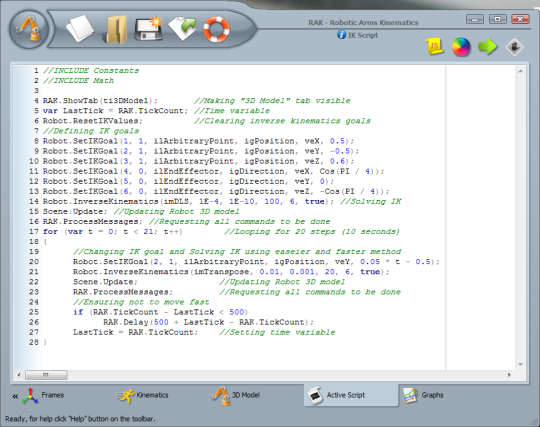
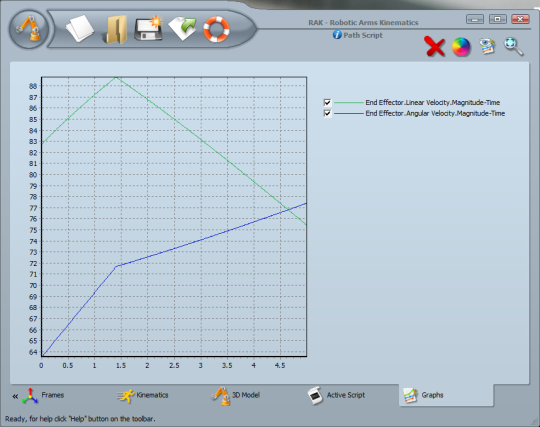
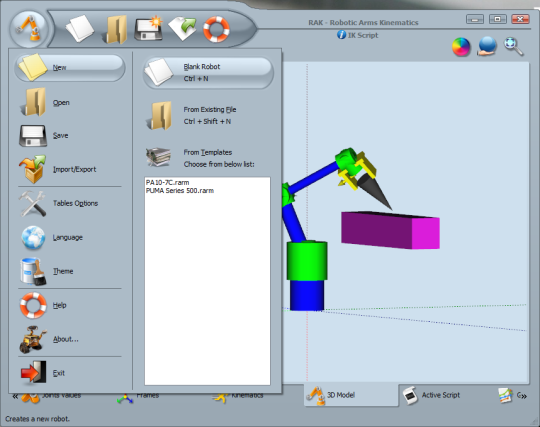
Screenshot der Software:
Softwarebeschreibung:
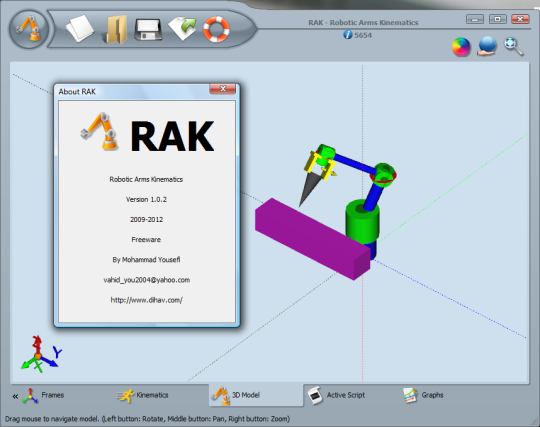
Version: 1.0.2
Upload-Datum: 15 Apr 15
Entwickler: Dihav
Lizenz: Frei
Popularität: 92
Größe: 11911 Kb
RAK ist ein Programm zur Modellierung Roboterarme und der Berechnung ihrer Kinematik.
Dieses Programm kann mit offenem Regelkreis, Einzelketten-Roboter simulieren.
Sie können eine Robotermodell durch seine Gelenke Positionen oder Denavit-Hartenberg (DH) Parameter.
Sie können die Kinematik und die inverse Kinematik des Roboters durch dieses Programm berechnet.
Es gibt auch einen Programmierbereich zu Programme und zur Ansteuerung realen Robotern.

Kommentare nicht gefunden