Aseba ist ein Multi-Plattform-Computer-Software, die Sie einfach und schnell programmieren Roboter erlaubt. Es bietet eine intuitive und moderne grafische Benutzeroberfläche, ist es kostenlos verteilt und auf alle gängigen Betriebssystemen unterstützt, dank seiner Open-Source-Lizenz.
Unterstützt mehrere Roboter
Die Software von Grund auf als ein Ereignis-basierte Roboter Rahmen geschaffen wird, der, sowie verteilte Steuerung von Multi-Prozessor-Mikrocontroller mobile Roboter effizient Ressourcen Nutzung ermöglicht.
Im Moment unterstützt es die Thymio II, von Hand bot, marXbot, Elisa-3 und E-Puck Roboter. Bitte lesen Sie die & ldquo; Erste Schritte & rdquo; Führung aus dem Projekt & rsquo; s Website (https://aseba.wikidot.com/en:thymiostarting) zu lernen, wie die Software zu betreiben Roboter zu programmieren. Sie werden auch verschiedene nützliche Beispiele dort zu finden.
Enthält eine integrierte Entwicklungsumgebung
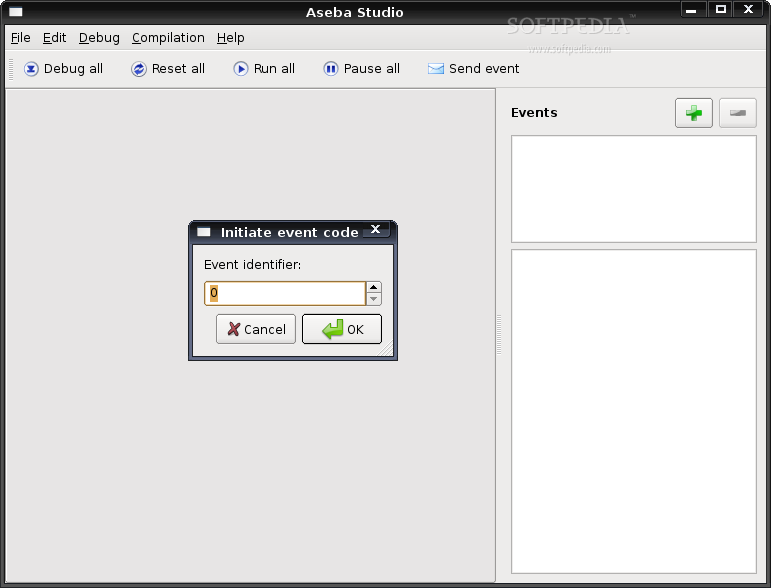
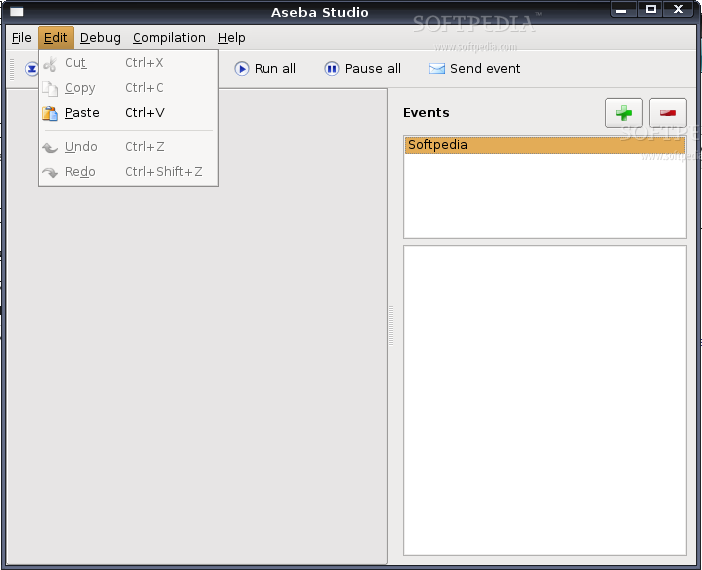
Aseba bietet dem Anwender mit einer IDE (Integrated Development Environment) für die Entwicklung und das Debugging Roboter. Sein Hauptziel sind integrierte Multi-Prozessor-Roboter, sowie Gruppen von Single-Prozessor-Roboter, simuliert oder real ist.
Unter der Haube, die Verfügbarkeit und unterstützte Betriebssysteme
Während Sie einen Blick unter die Motorhaube des Aseba Software nehmen, wir & rsquo; ve bemerkt, dass es in der Programmiersprache C ++ geschrieben ist. Seine schöne und moderne grafische Benutzeroberfläche (GUI) in Qt so entworfen, dass Qwt mit und Boost C ++ Bibliotheken.
Es ist eine plattformübergreifende Software, die alle GNU / Linux-Distributionen sowie die Microsoft Windows und Mac OS X-Betriebssysteme unterstützt. Unterstützte Computer-Plattformen umfassen sowohl 32 als auch 64-Bit. Aseba steht zum Download als native Installationsprogramme für Debian / Ubuntu-basierten Distributionen verfügbar
Was ist neu in dieser Version:.
- Compiler:
- Festspeicherlecks.
- Verbindung Dialog:
- hinzugefügt Animation, wenn es eine Trennung für ser:. Ziele
- Studio:
- Fixed Verhalten von VPL-Plugin bei Trennung / Wiederverbindung.
- Fixed Code in Studio, dass sich beim VPL-Plugin wird geschlossen.
- Fest unechten Autocompleter Kontextschalter.
- Show zuletzt verwendete Verzeichnis für Last-Dialogfeld.
- VPL:
- Absturz behoben, wenn eine leere VPL-Szene zu speichern.
- Fixed Neuübersetzung in VPL fehlt, wenn ein Ereignis-Aktions-Paar hinzugefügt wurde.
- Fixed Roboter in Motorkarte zu verschwinden.
- Verbesserte Fehlermeldung, wenn Action-Paar dupliziert wird.
- standardmäßig eingestellte Farbe auf schwarz für LEDs Karte.
- ThymioVPL:
- Fixed gespeichert Dialog auf OS X.
- Show zuletzt verwendete Verzeichnis für Last-Dialogfeld.
- Show-Version in der Titelleiste.
- Übersetzungen:
- Kleinere Korrekturen.
Anforderungen: :
- CMake
- Qt
- Dashel
- Boost C ++ Bibliotheken
- Qwt
- Enki

Kommentare nicht gefunden